EPI ToF の芯だけを解く
3D EPI ToF は、GRE ToF と同じ FID/GRE 系の流入効果を保ったまま、readout だけを segmented 3D EPI に置き換えて高速化する技術です。Skipped CAIPI、Shifted Flyback、Centric Sa/Sb は同じ EPI 文脈に出ますが、触っている stage と k-space axis が違うため、代替関係ではなく積み重ねとして読む必要があります。
TL;DR
- ToF contrast の源泉は fresh blood の流入効果であり、EPI そのものが contrast を作るわけではありません。EPI は readout を高速化する層です。
- EPI factor は 1 shot で複数 k-space line を取得して shot 数を減らしますが、T2* blur、B0 歪み、N/2 ghost、flow dephasing の管理と必ずセットです。
- Skipped CAIPI は ky×kz の sampling pattern を制御して g-factor と protocol 自由度を扱う技術で、ghost 除去や B0 歪み補正ではありません。
- Shifted Flyback は kx readout polarity を揃えて Nyquist ghost と flow-related ghost を構造的に避ける技術で、Centric Sa/Sb の短 TE 戦略と組み合わせて使います。
01GRE ToFの励起鎖を残す
contrast を作る FID/GRE 励起鎖と、時短を作る EPI readout train を分けて説明する。
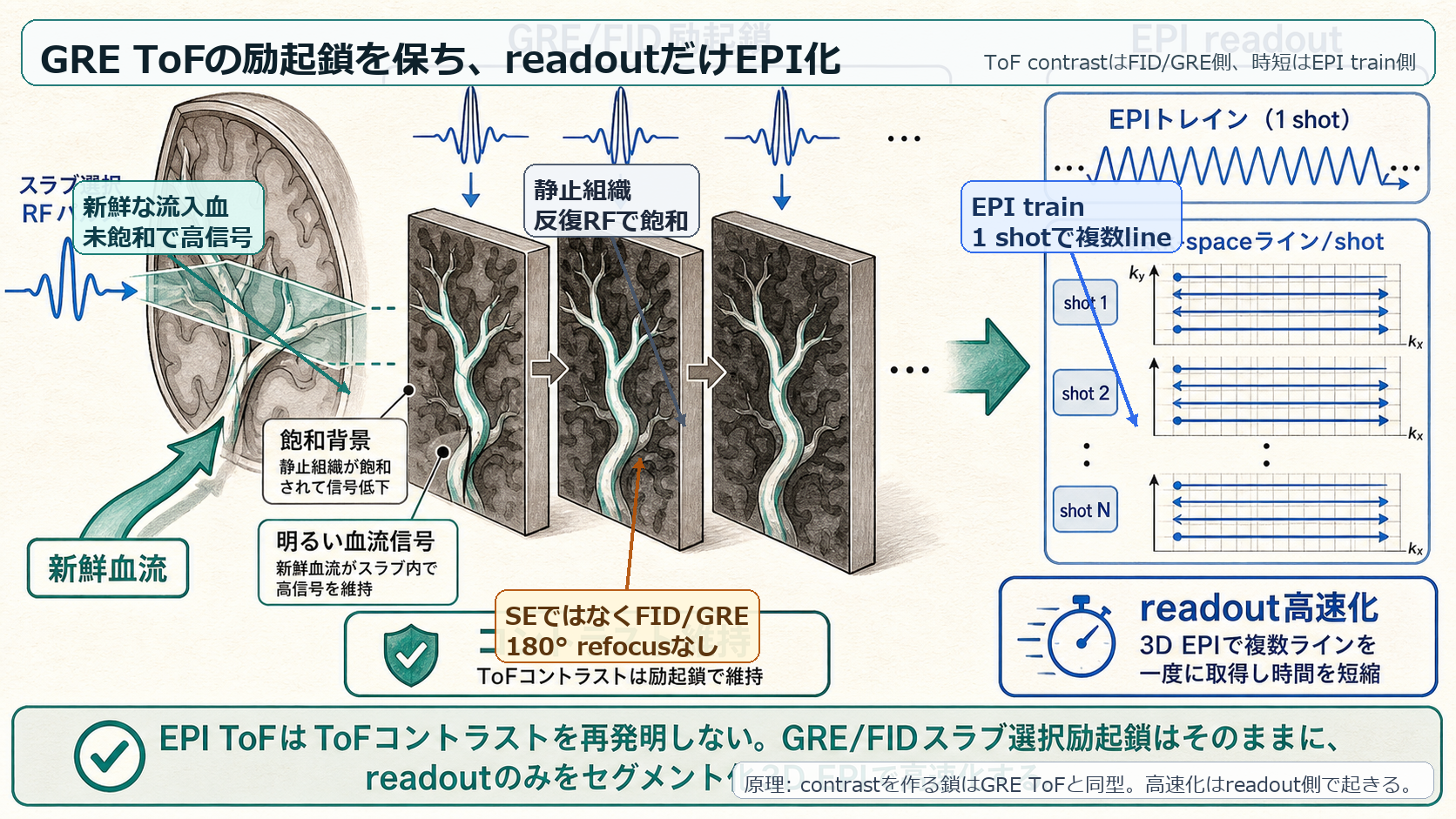
EPI ToF の最初の分岐は、EPI が ToF contrast を新しく作るわけではない点です。`ep_seg_fid_tof` は FID/GRE 系の励起鎖を残し、静止組織の飽和と新鮮血の流入効果を維持したまま、readout だけを segmented 3D EPI に置き換えます。
| 層 | 役割 | ここでの要点 |
|---|---|---|
| 励起鎖 | TONE / GRE / FID | ToF contrast を維持する主役。静止組織は飽和し、流入血は高信号になる。 |
| readout | segmented 3D EPI | 1 shot で複数 line を取り、shot 数を減らして撮像時間を短縮する。 |
| artifact 対策 | centric / flow comp / flyback | 高速化で増える blur、ghost、flow 位相を別レイヤーで抑える。 |
📚 用語解説 — ToF / FID-GRE / EPI train: ToF は time-of-flight の流入効果で、slab に入った未飽和血液が高信号になる現象。FID/GRE は 180° refocus を使わない励起鎖で、ToF の飽和差を残しやすい。EPI train は 1 回の励起後に複数 echo / k-space line を連続取得する readout 側の仕組みです。
🛠️ 運用方法: 説明は (1) contrast の源泉 = FID/GRE の流入効果、(2) 時短の源泉 = EPI train、(3) 画質代償 = 後段の centric / flow compensation / flyback で支払う、の順に話す。『EPI ToF は EPI で contrast を作る』という短縮表現は使わない。
⚠️ アンチパターン: EPI を contrast module と説明する、SE 系でも ToF が同じように成立すると言う、readout 高速化と励起鎖を混ぜる、の 3 つは混乱の起点です。SE は refocus の考え方が異なるため、ToF の流入飽和差を説明する host としては扱わない。
02EPI factorの高速化と代償
EPI factor は 1 shot あたりの取得 line 数。速くなるほど artifact 管理が主役になる。
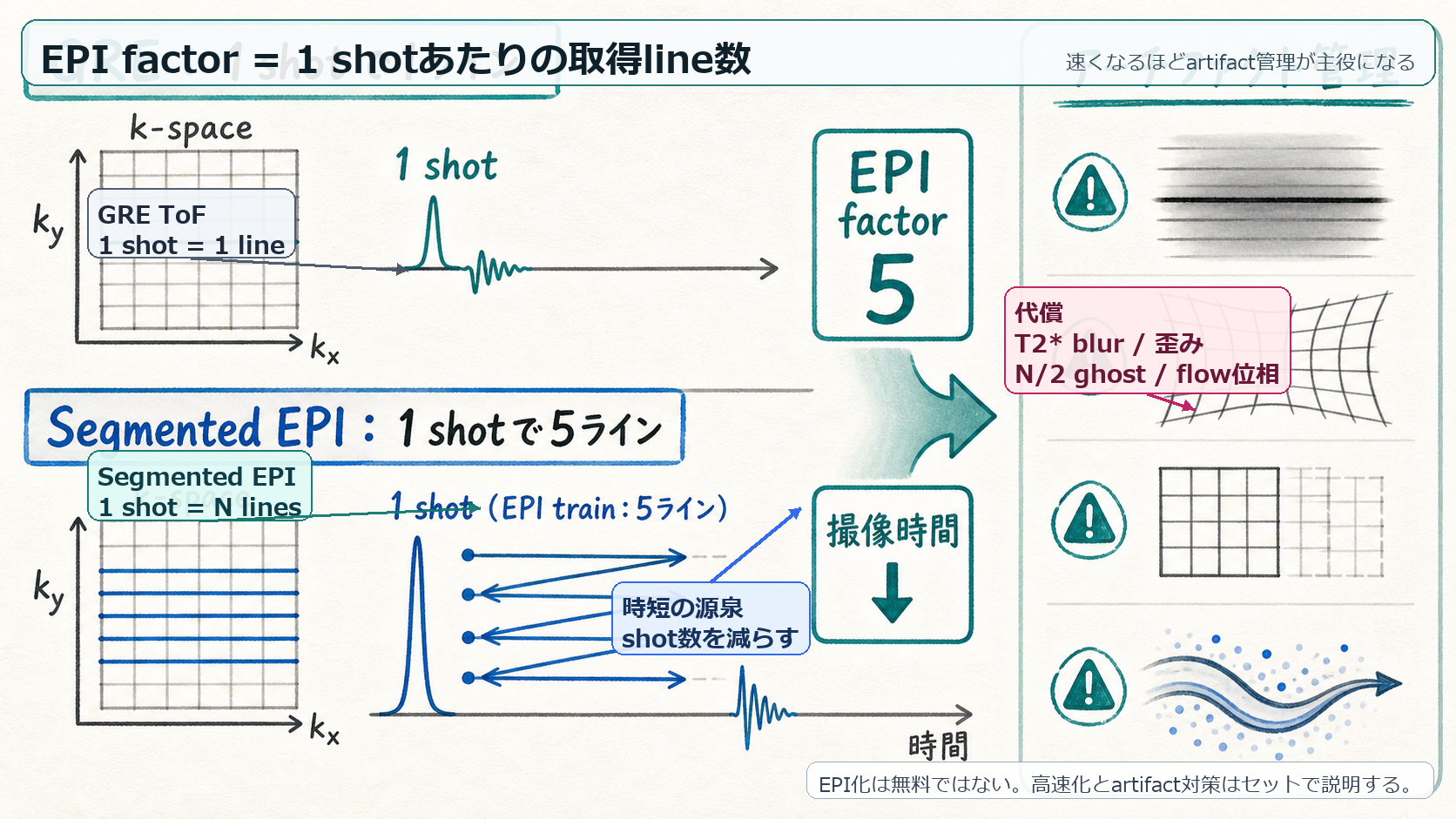
EPI factor は、1 shot で何本の k-space line を取るかです。理屈上は shot 数を減らせますが、echo train が長くなるほど T2* blur、susceptibility distortion、N/2 ghost、flow dephasing の管理が主役になります。
| 代償 | なぜ起きるか | 抑え方 |
|---|---|---|
| T2* blur | 後半 line ほど TE が遅く、PE 方向の blur と実効分解能低下が出る。 | EPI factor を上げ過ぎない。Centric で center を早く取る。 |
| susceptibility distortion | 長い readout 中に off-resonance 位相が蓄積し、PE 方向の伸縮として見える。 | B0 shim、bandwidth、EPI factor、必要時の補正を合わせて設計する。 |
| N/2 ghost | forward / reverse readout の gradient delay や eddy current 差が残る。 | navigator / phase correction、TOF では Shifted Flyback を検討する。 |
| flow dephasing | moving spin が echo train 中に flow-related phase を持つ。 | slice/read flow compensation と centric / flyback の組み合わせで抑える。 |
📚 用語解説 — EPI factor / ESP / N/2 ghost: EPI factor は echo train length に近い実務語で、1 shot の line 数を示す。ESP は echo spacing で、長いほど off-resonance の影響が蓄積しやすい。N/2 ghost は正逆 readout の位相差が FOV/2 ghost として現れる EPI 典型 artifact です。
🛠️ 運用方法: 『速い』だけで説明を止めず、必ず『その代償をどう払うか』を続ける。EPI factor を上げる相談では、TE、B0 shim、phase encode bandwidth、centric reordering、flow compensation、flyback のどれで画質代償を吸収するかを同じ表で確認する。
⚠️ アンチパターン: EPI factor を上げれば単純に画質も保ったまま速くなる、と説明するのは危険です。特に flow-sensitive な ToF では、通常 EPI の正逆 readout mismatch と flow 位相が重なるため、ghost 対策を省くと MIP で血管影や背景 ghost が目立つ。
03Skipped CAIPI
Skipped CAIPI は ky×kz の sampling 技術。ghost 除去ではなく g-factor と自由度を扱う。
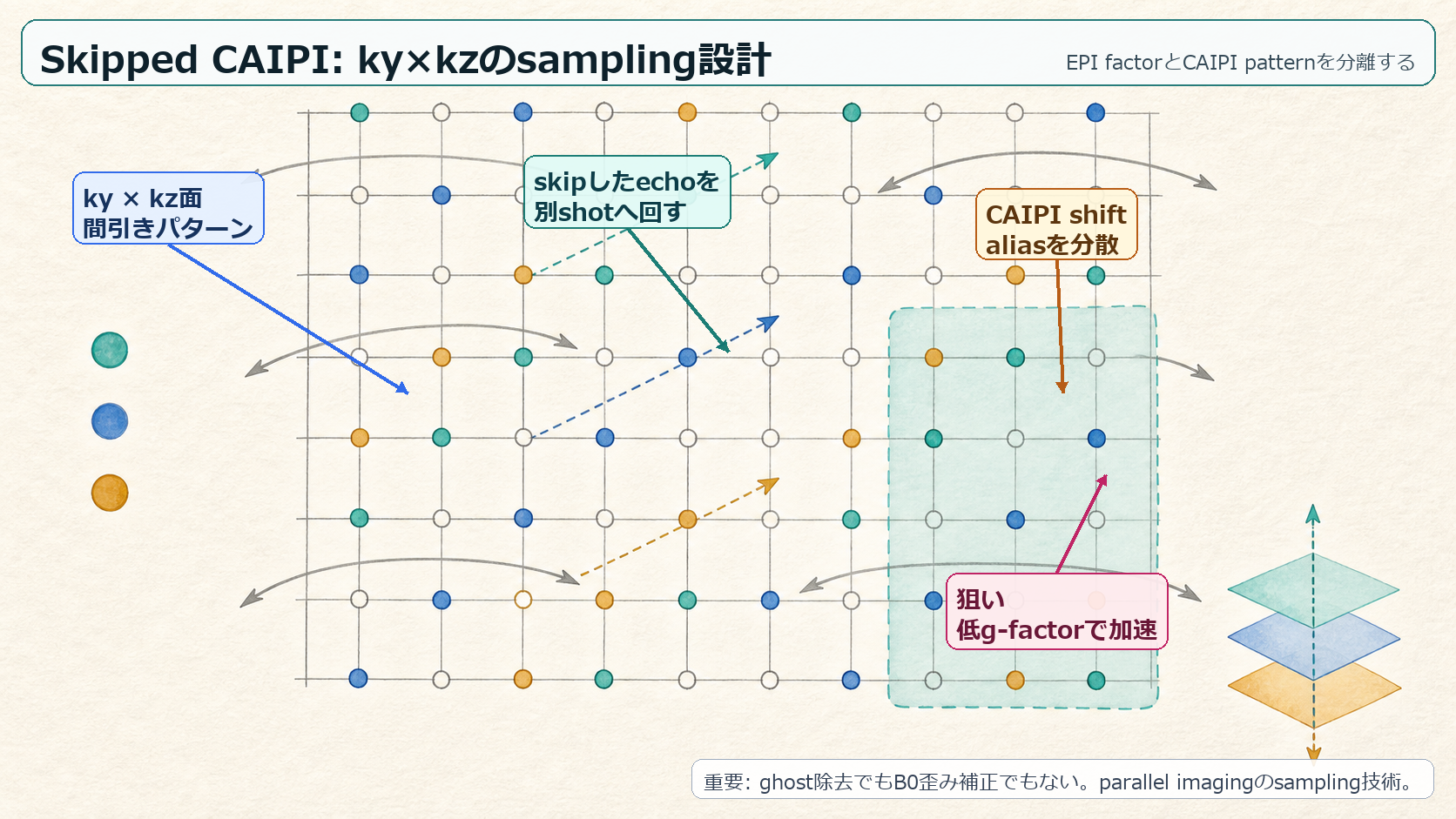
Skipped CAIPI は `ky×kz` の sampling 技術です。blipped-CAIPI の軌道を segment 化し、CAIPI cycle 内の一部 echo を後続 shot へ回すことで、EPI factor と CAIPI pattern を独立に選びやすくします。
| 項目 | Skipped CAIPIで見るもの | 見ないもの |
|---|---|---|
| 対象軸 | `ky×kz`、phase / partition 側の sampling 配置。 | `kx` readout polarity や正逆 echo の扱い。 |
| 狙い | 低 g-factor の controlled aliasing pattern と protocol 自由度。 | Nyquist ghost の物理除去や flow ghost の消去。 |
| 利点 | EPI factor、phase encode bandwidth、CAIPI shift の組み合わせ自由度。 | B0-induced geometric distortion の warping 補正。 |
| 再構成 | GRAPPA / 2D-CAIPIRINHA / CG 系 network の文脈。 | TOPUp や field-map based distortion correction の代替。 |
📚 用語解説 — CAIPI / g-factor / Segments: CAIPI は alias を coil sensitivity がほどきやすい位置に分散する考え方。g-factor は parallel imaging の SNR penalty を表す。Skipped CAIPI では Segments を編集し、EPI factor と CAIPI pattern を分けて扱えるため、加速と画質の設計自由度が上がる。
🛠️ 運用方法: Skipped CAIPI を説明する時は、まず『ky×kz sampling の話』と置く。次に、EPI factor、Ry/Rz、CAIPI shift、Deep Resolve / CG 系 recon の組み合わせを確認する。ToF 実運用では、現行 routine からの upgrade path として扱い、検証済み routine と同列に断定しない。
⚠️ アンチパターン: Skipped CAIPI を ghost 除去、B0 歪み補正、Shifted Flyback の代替として説明しない。特に『CAIPI で flow ghost が消える』は軸が違います。TOF 実運用検証、TOP algorithm 詳細、GRE-ToF との定量比較は現時点では要検証として残す。
04Shifted Flyback
Shifted Flyback は kx readout polarity 技術。single-polarity recon で ghost を構造的に避ける。
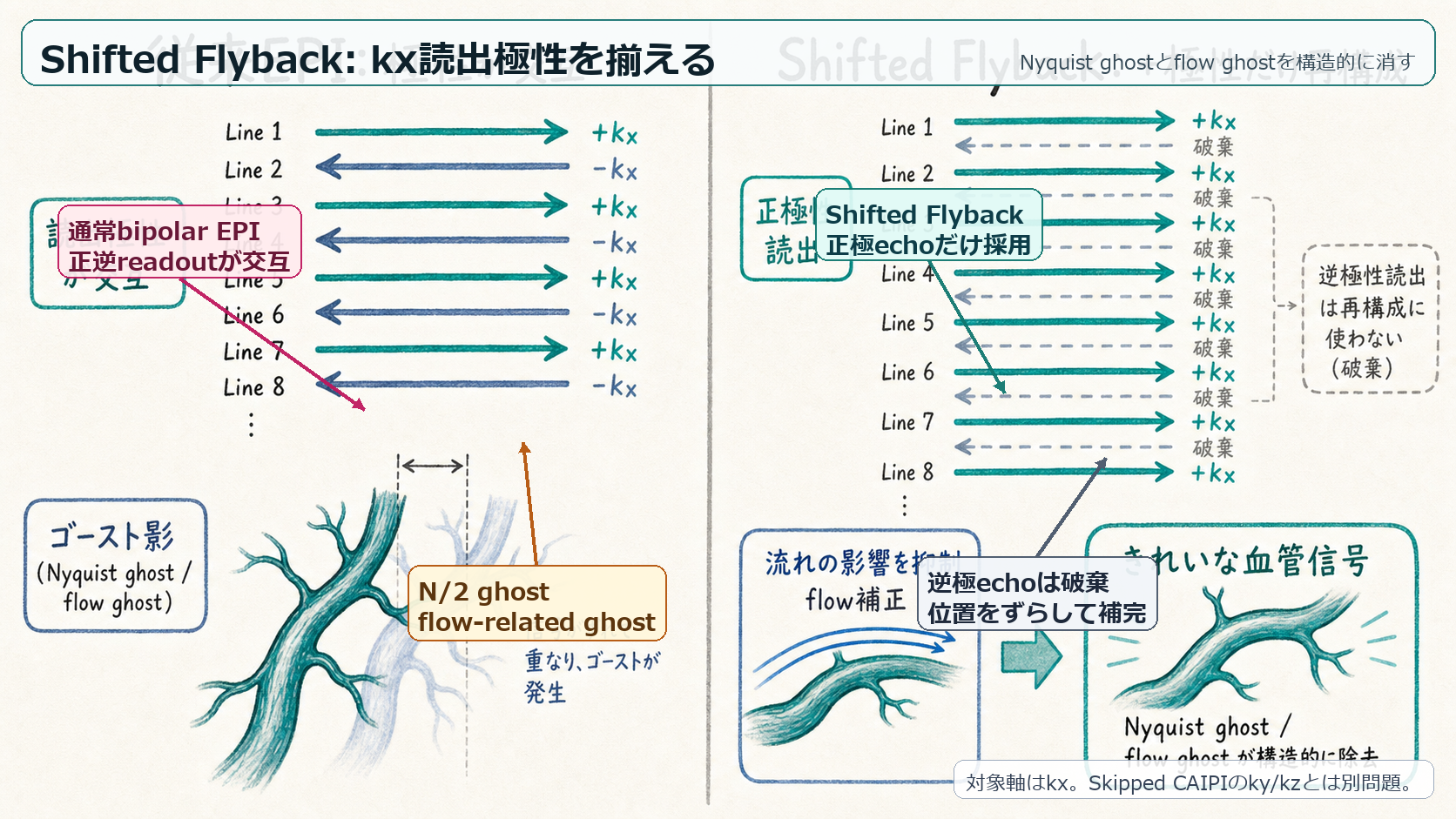
Shifted Flyback は `kx` の readout polarity 技術です。通常 EPI の forward / reverse echo が交互に recon へ入る構造では、gradient delay や eddy current 差、flow 位相差が N/2 ghost や flow-related ghost として現れます。Shifted Flyback は recon に使う echo の極性を揃えます。
| mode | 使うecho | 主な効果 | 代償 |
|---|---|---|---|
| Standard flyback | 正逆 echo を取得し、平均または補正に使う。 | SNR 改善、Nyquist ghost / segmentation artifact 低減。 | 追加取得により撮像時間が増える。 |
| Shifted flyback | 正極 echo だけを recon に使い、反対極性 echo はずらす / 破棄する。 | Nyquist ghost と flow-related ghost を構造的に避ける。 | 概念的に scan time 約 2 倍のコストを払う。 |
| TOF での位置づけ | centric + flow compensation と同時に考える。 | 短 TE と flow ghost 抑制を両立させる。 | 時間短縮だけを優先すると ghost が戻る。 |
📚 用語解説 — Flyback / polarity / flow compensation: Flyback は readout 極性を反転させた追加取得を使う方式。polarity は kx readout の向きで、正逆の非対称性が ghost を作る。flow compensation は moving spin の位相を補償する gradient 設計で、TOF のような flow-sensitive application では readout polarity とセットで効きます。
🛠️ 運用方法: ToF で背景 ghost や flow-related ghost を説明する時は、Shifted Flyback を『single-polarity recon』として説明する。Centric reordering、slice/read flow compensation、TONE と同じ recipe の一部として見せ、時間が増える理由も同時に伝える。
⚠️ アンチパターン: Shifted Flyback を Skipped CAIPI の readout 版のように説明しない。CAIPI は sampling 配置、Shifted Flyback は kx polarity です。また Standard flyback の平均効果と、TOF 用 Shifted Flyback の『片極性だけ使う』挙動を混ぜると説明が崩れる。
05Centric Sa/Sbとcenter 2回
Centric は center を早く取る acquisition order。Sa/Sb が両側へ進むため center が 2 回出る。
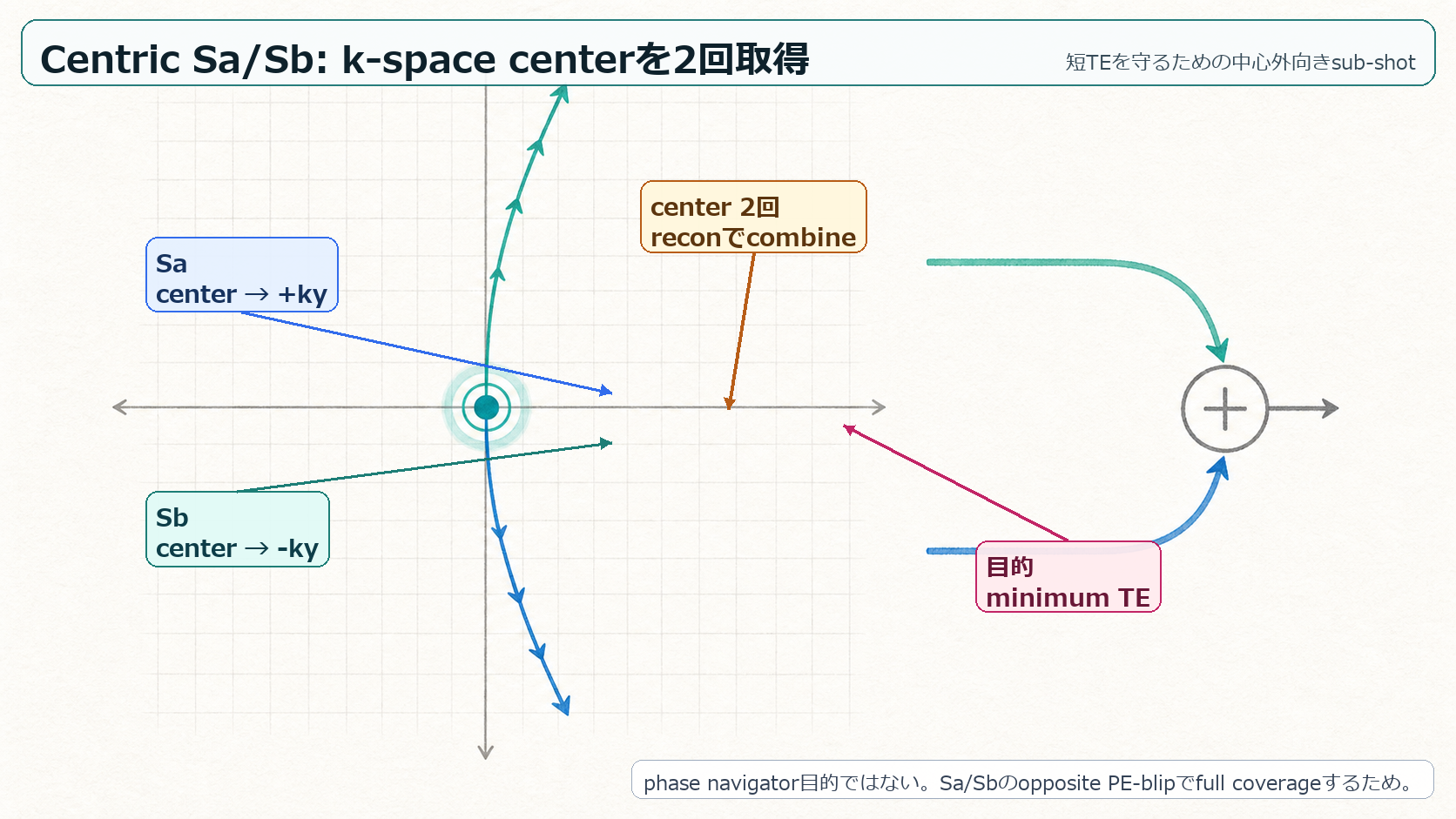
Centric reordering は、k-space center を早く取って minimum TE を短くするための取得順です。Sa/Sb sub-shot が center から両側へ進むため、center line は 2 回取得され、reconstruction で combine されます。
| 要素 | 何をするか | 誤解しやすい点 |
|---|---|---|
| Sa | center から一方の PE 方向、たとえば +ky へ進む。 | 単独で全 k-space を埋めるわけではない。 |
| Sb | center から反対の PE 方向、たとえば -ky へ進む。 | Sa の単純な navigator ではなく、coverage を補う imaging sub-shot。 |
| center 2回 | Sa と Sb の両方が center を通るため repeated center になる。 | variable density や phase navigator 目的とは断定しない。 |
| combine | recon で repeated center を統合する。 | flow-sensitive では phase variance が問題になり、flyback が必要になる。 |
📚 用語解説 — Centric / Sa-Sb / minimum TE: Centric は k-space center を早期に取る acquisition order。Sa/Sb は upper / lower PE 側へ進む 2 つの sub-shot。minimum TE は contrast と signal に効く中心 line を早く取るための設計目標で、TOF では短 TE と flow robustness の両方が重要です。
🛠️ 運用方法: center 2 回を聞かれたら、まず『Sa と Sb が中心から反対方向へ進むので、中心だけ重なる』と答える。次に『それは recon で combine される』、『ただし flow-sensitive では Sa/Sb の位相差が出るので Shifted Flyback が必要』まで続ける。
⚠️ アンチパターン: center 2 回を phase navigator、variable-density sampling、2D phase navigated EPI、echo-time shifting と説明しない。これらは表面上『中心を厚く見る』ように見えても、Apps Guide の Centric Sa/Sb とは目的も機構も違う。
06混同しない3軸整理
Skipped CAIPI、Shifted Flyback、Centric は別軸。代替ではなく stack として整理する。
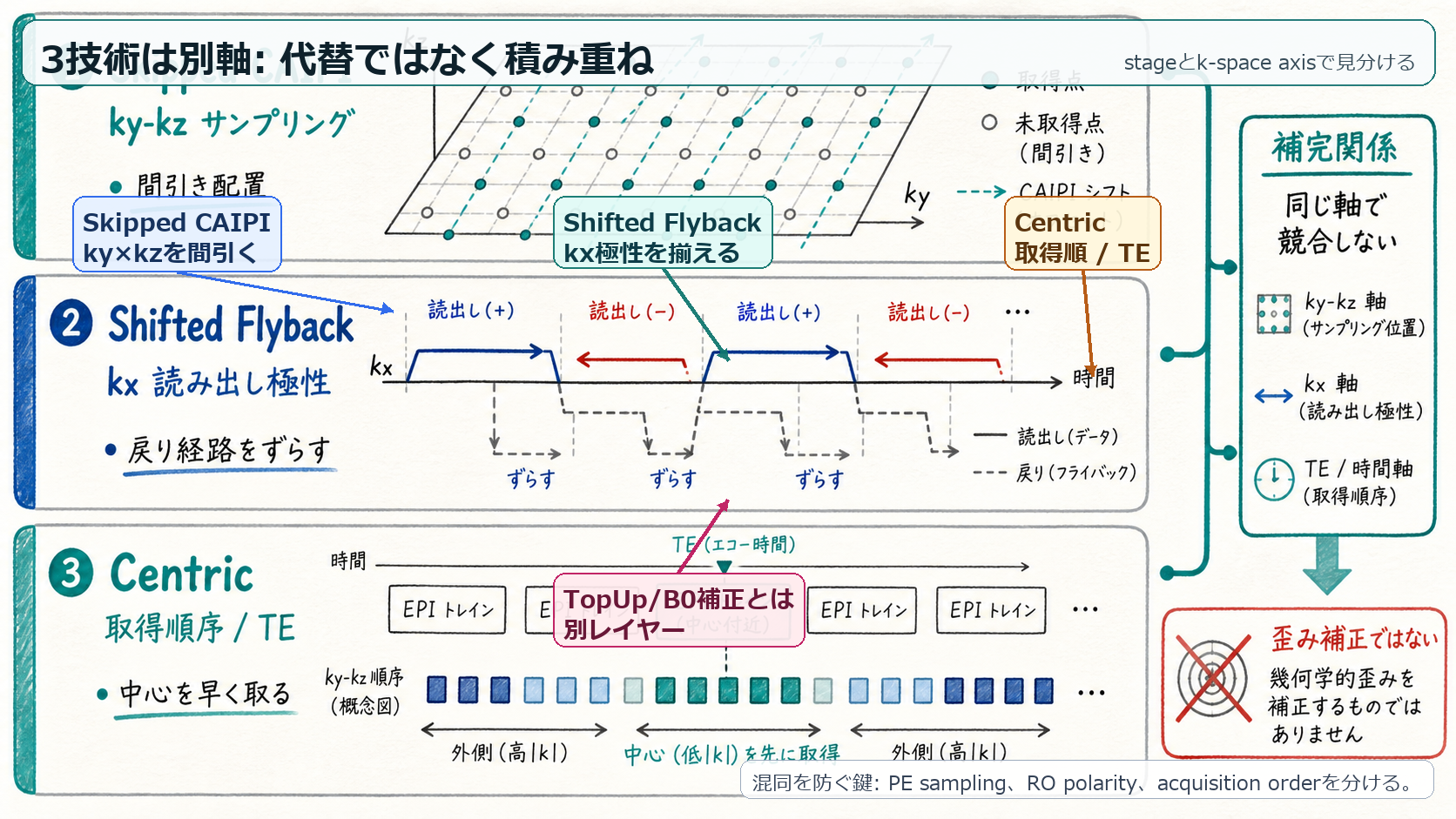
Skipped CAIPI、Shifted Flyback、Centric は、同じ EPI ToF の説明に出てきますが、触っている stage と k-space axis が違います。混同を防ぐには、ky×kz sampling、kx readout polarity、acquisition order / TE の 3 軸に分けるのが最短です。
| 技術 | 主に触る軸 | 解く問題 | 解かない問題 |
|---|---|---|---|
| Skipped CAIPI | `ky×kz` sampling | parallel imaging の g-factor / sampling 自由度。 | Nyquist ghost、flow ghost、B0 歪み補正。 |
| Shifted Flyback | `kx` readout polarity | N/2 ghost、flow-related ghost。 | CAIPI sampling、B0-induced geometric distortion。 |
| Centric reordering | acquisition order / TE | minimum TE、center 早期取得、Sa/Sb coverage。 | sampling 加速そのもの、B0 歪み補正。 |
| TopUp / B0補正 | post-processing / field map | 幾何学的歪み補正。 | ToF の励起鎖、CAIPI pattern、flyback polarity。 |
📚 用語解説 — stage / axis / stack: stage は acquisition、readout、reconstruction、post-processing のどこで効くか。axis は k-space の ky×kz、kx、時間/TE のどこを触るか。stack は代替ではなく積み重ねる関係で、EPI ToF ではこれらを組み合わせて速度と画質を両立させます。
🛠️ 運用方法: 技術質問を受けたら、最初に『それは sampling、polarity、order、post-processing のどれですか』と分類する。次に、Skipped CAIPI = どの点を取るか、Shifted Flyback = どちら向きの readout を使うか、Centric = いつ center を取るか、という 1 文へ落とす。
⚠️ アンチパターン: 3技術を同じ『EPI歪み対策』として横並びにすると誤る。Skipped CAIPI の TOF 実運用検証、TOP algorithm 詳細、GRE-ToF との定量 SNR/CNR 比較は、現時点のローカル資料では要検証として扱い、断定しない。
結論
- EPI ToF の芯: ToF contrast は FID/GRE 側の流入効果、EPI は readout 高速化。contrast と時短の層を分けると説明が崩れない。
- Skipped CAIPI: ky×kz sampling と g-factor / protocol 自由度の技術。ghost 除去、B0 歪み補正、Shifted Flyback の代替ではない。
- Shifted Flyback + Centric: kx polarity を揃えて ghost を避け、Sa/Sb centric で center を早く取る。短 TE と flow robustness の組み合わせ設計。
- 運用メッセージ: 迷ったら stage と k-space axis に戻す。どの点を取るか、どちら向きに読むか、いつ center を取るか、の 3 問で切り分ける。